Intelligent Ground Vehicle Competition (IGVC) - одно из самых интереснейших соревнований роботов в современном мире. В этом материале мы остановимся на обзоре предыдущих игр, состоявшихся в начале июня 2003 года.
The 11th Annual Intelligent Ground Vehicle Competition
Мероприятие проводилось с 31 мая по 2 июня прошлого года. На cегодняшний момент, посетив сайт IGVC, вы можете найти описания каждого из участвующих роботов в PDF-формате, некоторые фото прошедшего действа и видеофильм, занимающий порядка 90 Мб. Наше повествование будет строиться на базе всей этой информации и кроме обычных фотографий вы сможете увидеть наиболее интересные видеокадры. Итак, начнем. В 11-х по счету играх, проводимых в рамках Intelligent Ground Vehicle Competition, приняло участие 18 команд из 12 американских колледжей.
Стоимость каждого из роботов находится в пределах $10.000 и более, а над их созданием, в каждой команде трудилось достаточно много специалистов из различных технических сфер (программирование, электрическая часть и т.п.). Тут следует немного остановиться на правилах IGVC, чтобы стало более понятным, почему небольшие автоматизированные тележки, напичканные современной электроникой, стоят так дорого. Дело в том, что роботы, участвующие в IGVC, априори исключают вариант управления человеком. Они должны самостоятельно считывать данные, анализировать их и принимать решения. Само соревнование состоит из четырех ключевых конкурсов: - Autonomous Challenge. Автономные гонки. Дается определенная трасса, границы трека которой ограничены белыми линиями. Робот считывает полученные видео данные и на базе их анализа двигается по извилистой дороге. Для усложнения задания на трассе предусмотрены специальные препятствия. Задача - довести груз от старта до финиша.
- Navigation Challenge. Соревнования по навигации. Игровое поле представлено как расчерченная площадка с определенной системой координат (широта/долгота или х и у). Роботу нужно самостоятельно проехать все указанные в задании цели, не сбив ни одного препятствия. После этого они возвращаются на старт.
- Design. Оценка документации и презентации моделей.
- Follow the Leader. Гонка за лидером. Робот должен преследовать движущуюся цель - машину, управляемую человеком. За первые места в каждом из конкурсов выдаются денежные призы (небольшие, примерно $500 - $2.000). Конечно, это гораздо меньше стоимости самих роботов.
Начало
Соревнования проходили на небольшой поляне в реальных природных условиях, где организаторы создали некое подобие летнего лагеря. Были размечены и инсталлированы несколько игровых полей для ключевых конкурсов и навесы для пит-стопов. Я отметил этот момент, чтобы подчеркнуть - мы говорим не о "тепличных" условиях в рамках крытого стадиона или большого спортзала с искусственным покрытием, а о реальном природном ландшафте. Правила игр даже предполагали мелкий дождь как элемент соревнований. То есть, условия были не из легких, учитывая тот факт, что призы не перекрывали стоимость самих роботов. Перед студентами колледжей ставились задачи, над которыми трудятся профессиональные ученые и инженеры Министерства Обороны США (Department of Defense (DoD)) и в частности, его подразделения - Defense Advanced Research Projects Agency (DARPA). Участников было много, технический уровень роботов оказался достаточно высоким, да и государственный интерес к IGVC проявился должным образом. Важность проводимого действа подчеркивал статус персон, выступивших на открытии IGVC-2003.
Сенатор Карл Левин (Carl Levin), штат Мичиган
Ричард Макклеланд (Richard McClelland), директор U.S. Army TARDEC (Tank Automotive Research, Development and Engineering Center)
Лью Голдберг (Lew Goldberg), вице-президент AUVSI (Association For Unmanned Vehicle Systems Internatiomal) - мощного образования, под эгидой которого проводятся соревнования автономных роботов в воздухе и под водой
Во всех приветственных речах повторялась одна и та же мысль - "за вами, молодыми, будущее!", а также "роботы на земле, в воде и в воздухе!". Естественно, были продемонстрированы новинки в области современных военных технологий. В частности, на игровое поле приехала беспилотная БМП (бронетанковая машина пехоты) Stryker.
Вес Stryker составляет 18 тонн. Внутри и снаружи БМП напичкана всевозможной электроникой. Общий вес только компьютерной начинки для центральной системы управления составляет около 18 кг
Внутри Stryker предусмотрена кабина, но кресло пилота в ней пустует - БМП полностью автономна с точки зрения управления
А внешне эта беспилотная машина напоминает обыкновенную БМП! Кстати, Stryker и есть обыкновенная БМП, которая состоит на вооружении армии США, в данном случае просто привезли ее беспилотный вариант. Впрочем, это отдельное направление развития современной техники - создание автономного управления на базе уже существующих машин. Некоторое подобие такового можно наблюдать и в современном автомобилестроении. Но, вместе с тем, есть варианты, когда военные машины нового поколения разрабатываются практически с нуля, что нам демонстрируют роботы-солдаты Roboart III, Robotrix и Gladiator, а также современные самолеты-разведчики.
Autonomous Challenge
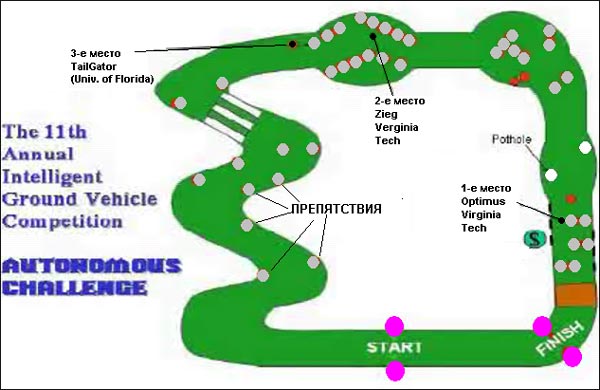
Autonomous Challenge являлся ключевым конкурсом-соревнованием в рамках этих игр. Если робот не был готов к этой гонке, то он не допускался к соревнованиям вообще.
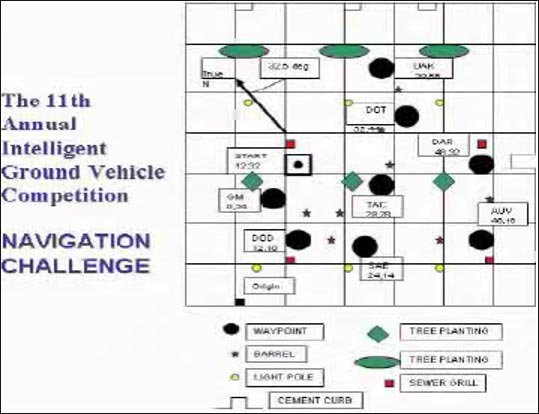
Сама трасса показана на схематическом рисунке. Чтобы ее преодолеть, роботу необходимо проехать по дорожке (трассе), очерченной двумя белыми линиями и при этом не сбить ни одного препятствия.
Основная задача - довезти груз от старта до финиша. Сам груз представлял из себя обыкновенный ящик стандартных размеров (приведенных в задании к соревнованиям).
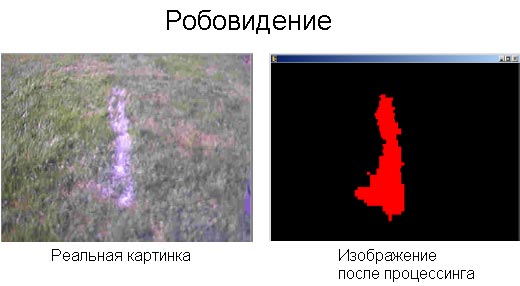
До финиша реально не доехал никто. Задание оказалось достаточно сложным и главная причина плохих результатов - слабые алгоритмические модели по реализации распознавания и анализа изображений, а также принятия адекватных решений.
На рисунке показано, что действительно видит робот ALVIN IV (команда из Trinity College), после преобразования реального изображения практически в бинарный вид. Эта иллюстрация в той или иной степени актуальна для всех участников, поскольку реализации зрения и распознавания образов у них были подобными. Роботам было очень сложно принимать решения, учитывая, что и линии и препятствия (все, что было связано с белым цветом) представляли из себя "табу". Помимо этого препятствия могли распознаваться за счет показаний с ультразвуковых датчиков. Некоторые роботы, имея переизбыток данных и плохие алгоритмы их анализа, вели себя неадекватно. Например, они могли просто развернуться и поехать в обратном направлении, либо, уходя от препятствий, случайно заехать за белую линию и после этого направиться прямиком в чистое поле.
Ну и, конечно, с препятствиями многие не церемонились:)
Navigation Challenge
Навигация - это одна из самых старых наук. Когда-то люди ориентировались по звездам или даже по мху на стволах деревьев, теперь же наступила эра системы глобального позиционирования GPS. Современные роботы также могут преуспеть в этой старой науке. Поле действий Navigation Challenge - это двумерная система координат, выраженная в градусах широты или долготы, либо в обычном х и у виде (представлено в метрах).
Задачей робота является определение месторасположения целей, координаты которых были заданы заранее, вычисление направления и оптимального пути следования. Для усложнения задачи, также как и в Autonomous Challenge, были предусмотрены препятствия, большая часть из которых, находилась на путях следования от одной цели к другой.
После того, как все цели были пройдены, робот должен вернуться на стартовую позицию. Это достаточно стандартная задача и с ней справилось большинство лидирующих команд. Где это применимо? Прежде всего - в военных целях, для связи беспилотной техники с системой GPS. При наличии двумерной карты, полученной посредством системы глобального позиционирования, роботам, помимо ее анализа, сейчас необходимо приобрести еще одну важную способность - преодолевать препятствия. Как показал конкурс Autonomous Challenge, это пока плохо реализуемо. Да и в гонке DARPA Grand Challenge, состоявшихся в марте этого года (призовой фонд $1 млн), эта же проблема не позволила ни одному из участников приехать к финишу.
Гонки за лидером
Достаточно стандартный конкурс, в котором робот должен проехать по определенной трассе от старта к финишу, следуя за "лидером" - машиной, управляемой человеком. На пути следования было предусмотрено несколько сложных элементов типа туннеля и моста.
С задачей преследования движущейся цели справились далеко не все машины. По данным видеофильма до финиша вообще добралась только одна - TailGator (Университет Флориды).
Конкурс дизайна
Конкурс дизайна проводился в самом начале соревнований и хотя он был не таким ярким с точки зрения представления иллюстраций, интерес вызвал не малый. Причем призовой фонд в этом состязании не меньше, чем в Autonomous или Navigation Challenge.
Нужно отметить, что команды были подготовлены очень хорошо. Практически на каждого робота была написана PDF-документация с приведением графических материалов, алгоритмических схем и т.п. По существу, всем скопом команды выпустили небольшой справочник по современному роботостроению. И это неспроста, поскольку документация оценивалась отдельно и сразу по нескольким критериям, в число которых входила даже грамотность написания, не говоря уже о полноте изложения.
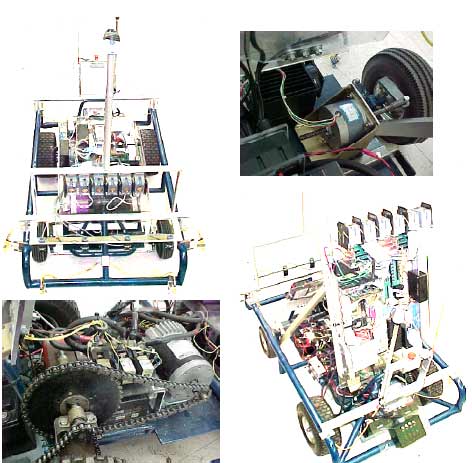
От каждой команды зачитывался доклад и представлялись непосредственно сами модели. Жюри, глядя на такие презентации, оценивало даже ораторские способности докладчиков, логическую организацию речи и т. п. Ну и, соответственно, отдельно оценивались представленные технологии. Позволю себе привести наиболее интересные фотографии роботов, участвовавших в соревнованиях.
Bluefield State College. Centurion II
Bluefield State College. Vasilius
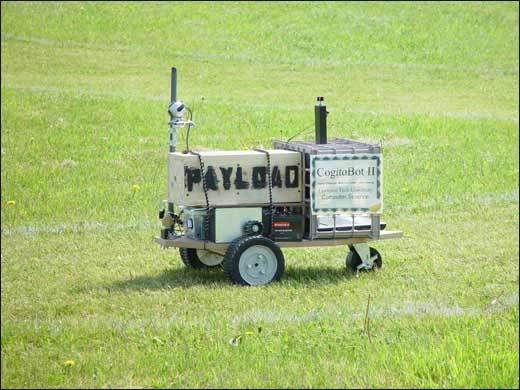
Lawrence Technological University. CogitoBot II
University of Florida. TailGator
University of Alberta. Kodiak
University of Cincinnati. Bearcat III
Virginia Tech. Optimus
В завершение
Intelligent Ground Vehicle Competition проводятся с 1993 года. Если проанализировать ситуацию, то "гонки века" DARPA Grand Challenge и их альтернатива IRRF - это только продолжение планов, впервые реализовавшихся в рамках IGVC.
Ознакомившись с материалами по IGVC-2003, я немного пересмотрел свою точку зрения на постоянные новости о появлении беспилотной военной техники - они приобретают уже более четкие смысл и содержание. Причем в данном случае мы говорим не о навороченных рабочих станциях, а об использовании обыкновенных домашних РС (ОС Windows/Linux).
Материал был впервые опубликован на 3DNews.ru
|