События последнего времени развиваются достаточно стремительными темпами, идет настоящая «гонка вооружений» — понятие к которому мы привыкли в конце прошлого, 20-го века, и от которого нас в некоторое время даже пытались отучить. Только теперь мы уже говорим не о ракетах и тому подобном, а о военных роботах. Еще совсем недавно беспилотные машины не могли самостоятельно преодолеть трассу по сравнительно ровному природному ландшафту, а теперь перед ними ставятся уже более сложные задачи — автономное перемещение в рамках городской местности.
И хотя многие наработки рассчитывается применять в мирных целях — спасательные операции, усовершенствование существующей техники (например, в современных автомобилях устанавливаются компьютерные системы слежения за разметкой дороги, дистанции от других машин, системы автопарковки, в будущем это и такси без водителей и т.п.), основная задача этих машин все-таки больше военная, а именно, замена людей на реальных полях сражений.
Конечно, в этом разрезе общее мировое внимание привлечено к американским гонкам DARPA, проводимыми под крылом Министерства Обороны США. Но совсем недавно, а именно с 15 по 18 мая в Хаммельбурге (Hammelburg) на севере Баварии (Германия), под крылом уже Бундесвера прошли состязания наземных роботов European Land-Robot Trial (сокращенно — ELROB). Данное событие освещалось весьма скудно, хотя именно там европейцы показали, что имеют арсенал не хуже, чем в США. То есть, сейчас нельзя выявить явного лидера в общих роботехнологиях. При этом стоит отметить, что во всех видах такой техники присутствуют одни и те же идеи. Итак, что же будет в сегодняшнем обзоре? В принципе, мы не станем касаться описания конкретно ELROB, хотя иногда будем делать и это, а больше посмотрим на конкретную продукцию фирм-участников. Там много интересного.
SmarTer (Швейцария)
В данном случае мы говорим не о какой-либо фирме-производителе, а о мощной команде, спонсируемой со стороны таких известных имен как Singleton Technology (3D-карты, Швейцария), BlueBotics SA (поддержка, Швейцария), SPARC European Project (автомобиль, навигация, Германия-Швейцария), BACS European Project (локализация, навигация, анализ окружающего пространства, Швейцария), Цюрихская лаборатория автомномных систем ASL-ETH при Швейцарском Федеральном Технологическом Институте, RI-CMU (аббревиатура от Robotics Institute, Carnegie Mellon University — навигация, США). Как видите, проект интернационален. Что же получилось в итоге?

За основу SmarTer взят обычный «Smart» в силу своей компактности, легковесности и универсальности в использовании. Само название является аббревиатурой от «Smart All Terrain». Питание электронной части этого комплекса осуществляется за счет 24-вольтового генератора, а для буфера предусмотрен дополнительный аккумулятор, подзаряжающийся в момент езды. Машина полностью автономна и управляется с помощью специальной системы. Что касается сенсоров, то их достаточно много: - Три внешних лазерных сканера для навигации (SICK). Один расположен впереди снизу, а два на боковых краях крыши.
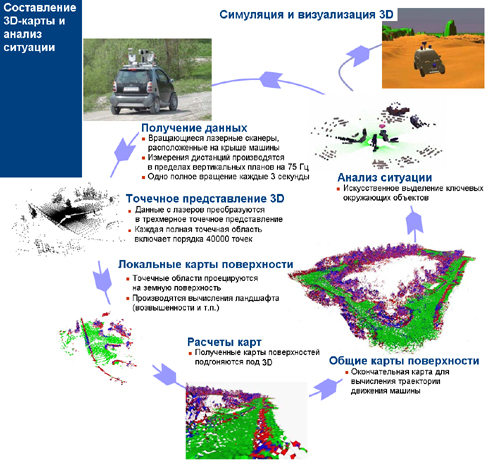
- Вращающийся сканер (3D SICK). На самом деле используются два вращающихся лазерных сканера, сумма информации с которых дает объемное представление окружающего пространства. И SICK и 3D SICK выполнены на идентичной элементной базе, а именно, на сканерах Sick LMS291-S05. В крутящемся сканере два идентичных модуля расположены на крыше по центру, прикреплены «спина к спине» и вращаются в горизонтальной плоскости.
- Кругонаправленная камера Sony XCD-SX910CR с фокусным расстоянием 12 мм и параболическим зеркалом. Она расположена на крыше перед крутящимся сканером, и предназначена для получения панорамных изображений, которые потом необходимы для создания трехмерной карты местности.

- Монокулярная камера. Это та же Sony XCD-SX910CR, но с фокусным расстоянием 4,2 мм, она расположена внутри автомобиля за ветрозащитой. Является вспомогательной для составления 3D карты;
- Видеокамера производства Sony (марка не указана), снятое видео от которой передается на пункт управления (дальность передачи до 2 км);
- Инерционная измерительная система — Crossbow NAV420, водонепроницаемая. Она включает 3 акселерометра, 3 гироскопа, трехмерный магнитный сенсор и GPS-приемник. Встроенный DSP (digital signal processor) обрабатывает данную информацию и результаты этой обработки передаются для более точного управления в плане направления;
- Дифференциальная GPS-система — Omnistar Furgo 8300HP. Если с машины виден DGPS-спутник, то его данные совмещаются с данными системы автомобиля, то есть производится коррекция. Если спутник не виден, то — работает просто GPS.
- Внутренние датчики статуса автомобиля. Тут, в принципе, все, - начиная от датчиков закрытия двери, до измерения оборотов, температуры и т.п.
Основные операции, которые производятся в рамках SmarTer можно описать тремя ключевыми понятиями: локализация, планирование и управление движением, 3D картография и анализ ситуации. Для этих целей на борту машины установлено четыре компьютера с таким наполнением: процессор Pentium M 2 ГГц, 1,5 Гб RAM, гигабитный Ethernet, 2 серийных порта и винчестер на 30 Гб. Каждый из компьютеров предназначен для выполнения конкретных специализированных вычислительных задач, а также отвечает за проведение измерений различных параметров.
Сам анализ окружающего пространства является достаточно сложным, и для его проведения, как вы уже смогли заметить, задействовано большое количество спецустройств. Причем, вы могли заметить в описании, что некоторые из них дублируют действия друг друга. Например, кругонаправленная видеокамера и крутящийся лазерный сканер. На самом деле, они не столько дублируют, сколько дополняют друг друга, в результате чего выработка решений производится более точно. Машина не обладает способностями человеческого мозга и нервной системы, поэтому и видит, и считает все по-другому. Например, нам, для того, чтобы определить препятствие достаточно его увидеть, в крайнем случае, нащупать и обогнуть его. В робототехнике же все немножко сложнее, поскольку по результатам от видеокамер они ничего существенно получить не могут, а сканеры (в данном случае мы говорим о лазерных) выступают в роли щупов. То есть, если говорить образно, такие машины и смотрят, и щупают одновременно. Это, кстати, немного отвлекаясь от темы, достаточно интересное течение среди научных исследований современности, а именно, смогут ли когда-нибудь роботы сортировать объекты также как это делает человек? Например, дом — это дом, дерево — это дерево. Или все-таки для искусственного интеллекта это очень сложно? Скорее всего, что да. Роботы на данный момент обладают очень слабым ассоциативным рядом, а иногда и не обладают им вообще. Варианты с лазерными сканерами и трехмерными картами местности это только выход из положения, не более того.
Но, подводя итог о детище швейцарской команды SmarTer, очень рекомендую вам зайти на их сайт smart-team.ch, где есть достаточно подробная документация к машине. В ней описаны основные принципы подобных роботов, в том числе это можно смело отнести и к участникам DARPA Challenge. И на самом деле, это современные произведения научно-технического… нет, не творчества, а искусства.
Со стороны Швейцарии была еще одна команда, представляющая известную в узких кругах компанию Macroswiss, которую мы рассмотрим позже, а теперь имеет смысл обратиться к команде Ten 10.
Base 10 (RoboScout) KLT (Германия)
Немецкая фирма BASE TEN SYSTEMS Electronics GmbH была образована еще в 1976 году и полностью принадлежала американской BASE TEN systems, Inc. В 1992 эту компанию полностью перекупил Фердинанд Золлер (Ferdinand Zoller), и начал ее развивать, после чего в этом же году основной капитал увеличился в семь раз (с 50 тысяч марок до 350 тысяч), а после в 1995 году вообще достиг 1 миллиона марок и так по нарастающей. Основное направление деятельности Base 10 — современные оборонные технологии. В основном речь идет о сложных программно-аппаратных комплексах, измерительных системах, системах навигации. На ELROB 2006 Фердинанд Золлер возглавлял команду RoboScout, созданную в рамках его компании, а машина называлась KLT (аббревиатура от Kommunikations- und Lenkungs Trager — носитель коммуникации и управления).

Это достаточно уникальная разработка, даже больше не в своей механической части (четырехколесный робот с передним приводом), а в электронной. Данные с двух видеокамер передаются через спутник на наземную станцию управления, которая может находиться на расстоянии… до 1000 км. Технология называется SOTM ("Satellite On The Move”). Сама разработка началась примерно год назад в мае 2005, и на данный момент предусматривает множество вариантов развития. Например, сейчас идет отладка систем дистанционного управления движением.
Что это может дать в итоге? Будете смеяться, но Starcraft. То есть, в зоне боевых действий будут находиться только роботы (танки, БМП, самолеты, робо-солдаты, разведчики и т.п.), а управление ими осуществляется за 1000 км на командном компьютере. И это реальные перспективы. Вот такая скромная фирма Base 10, а на ее сайте нет ни одной картинки.
QinetiQ (Великобритания, хотя…)
М-да, вот тут-то организаторы ELROB 2006 мягко сказать… Сами состязания обсуждались не очень положительно некоторыми специалистами даже больше не потому, что в них отсутствовал какой бы то ни было призовой фонд. Совсем не потому. Дело в том, что в ELROB повторили практически один в один правила американских DARPA — участие в ELROB 2006 могут принимать только европейцы, а зарубежные компании допускаются только как спонсоры и то, если они не являются государственными структурами. Таким образом, ни одна команда из последних DARPA Grand Challenge не могла принять участие, а некоторые из них хотели бы. Но имел место и определенный казус…
Фарнборо-Хэмпширской компанией QinetiQ с ноября 2004 года полностью владеет фирма Foster-Miller, Ink., американская... Мало того, сказать о том, что Foster-Miller Ink. не якшается плотно с госструктурами США, это ничего не сказать. В прошлом году контракты с весомыми американскими госучреждениями оборонной промышленности измерялись десятками, а иногда и сотнями миллионов долларов. А на сайте ELROB скромная отписка: где команда QinetiQ – это подразделение одноименной компании, находящейся в Фарнборо (Великобритания), никакого внешнего спонсирования нет и т.п. Но, пардон, сайт www.foster-miller.com, логотип-заголовок «Foster-Miller A QinetiQ Company» о чем-нибудь говорит? Причем и привезли-то они технику, состоящую на вооружении армии США. Действительно, какое тут может быть внешнее спонсирование от госструктур зарубежных стран.
QinetiQ разработала и выпускает военных роботов Talon, без которых не обходятся ни одни современные военные действия американских войск. Ага, многие вспомнили…
Помимо этого QinetiQ очень плотно занимается оборонными технологиями, включая эксперименты с современными материалами (например, QinetiQ's Plastic tank — пластиковый танк), а также производит исследования в областях энергетики, космических технологий, охранных комплексов. На ELROB «подразделение» QinetiQ привезла четыре автономных машины. Это пресловутый Talon — радиоуправляемый гусеничный робот, предназначенный для обнаружения взрывчатых веществ, спасательных операций, исследования местности и тому подобного.
Причем на сайте ELROB пишут: «Разработка системы Talon стартовала по заказу Министерства Обороны США, которым нужна была машина для выполнения спасательных, тактических операций и обнаружения взрывчатых веществ. Более 200 роботов Talon сейчас принимают участие в операции в Ираке». Может, QinetiQ входит в касту «непогрешимых», раз их допустили к мероприятию, а более мирных участников DARPA Grand Challenge нет. На соревнованиях была также представлена одна из последних моделей от QinetiQ — «Longcross», разработка которой стартовала в 2001 году, но уже по заказу Министерства Обороны Великобритании.
Это электрическая радиоуправляемая гусеничная машина (RCV — Radio Controlled Vehicle) с потенциальной возможностью сделать на ее базе дизель-электрическую. Корпус Longcross скомбинирован из углеродистого волокна и кевлара (суперпрочный материал). Это позволяет ему защищаться от попаданий пуль и снарядов.
Longcross на выставке …
Longcross на испытаниях …
А главное предназначение Longcross — обнаружение взрывчатых веществ (бомб, мин) плюс съемка — совокупность четырех камер, работающих в разных диапазонах: видимом, тепловом и т.п. Все четыре изображения передаются на станцию управления. Также есть трехосевой сенсор Head/Pitch/Roll. Если оснастить Longcross большим интеллектом, cчитайте, повесить дополнительные датчики и системы анализа, то Longcross сможет определять наличие газовой атаки и тому подобное.
Третья представленная модель — радиоуправляемая машина Rangemaster, базирующаяся на прототипе от QinetiQ, именуемом Carson. Питание дизель-электрическое. Здесь речь идет о передвижении не на гусеницах, а на четырех колесах со специально усиленной ходовой частью. С точки зрения электроники там все стандартно — четыре камеры, трехосевой сенсор Head/Pitch/Roll, система обнаружения взрывчатых веществ плюс поддержка GPS.
На прототипе Carson построена еще одна машина, которую QinetiQ привезли на ELROB — Black Max. В принципе, сами создатели называют Black Max четвертым поколением Carson. В данной модели усилена корпусная защита.
Промежуточное завершение
Как видите, европейцы показывают высокий класс. И думается, что организаторы следующих ELROB и DARPA могут более адекватно продумать территориальные ограничения в правилах. Ведь, что получилось даже год назад? Все дружно описывали DARPA Grand Challenge, и никто даже не задумывался о том, что в Европе проектируются и выпускаются роботы не хуже. Теперь ELROB это показала — ситуация стала тупиковой. Ну, а в следующей части вас ждет еще очень много интересного…
Знакомство «братьев по разуму»: Kurt3D и FoxBot…
Материал был впервые опубликован на 3DNews.ru
|