Продолжаем рассматривать участников закрытых состязаний наземных роботов European Land-Robot Trial (сокращенно — ELROB), в которых ведущие европейские производители показали свои лучшие разработки.
Kurt3D (Германия)
Разработка системы для робота Kurt3D началась в институте автономных интеллектуальных систем Фраунгофера (Fraunhofer Gesellschaft - Institut fur Autonome intelligente Systeme) и продолжилась в университете Оснабрюка (University of Osnabruck), именно от него и была представлена команда. Вернее, в институте Фраунгофера еще в 1995 году был разработан предшественник Kurt 2 и само название является аббревиатурой от Kanal-Untersuchungs-Roboter-Testplattform (Канал-Исследования-Робот-Тестплатформа). А Kurt3D — это весомое его продолжение.
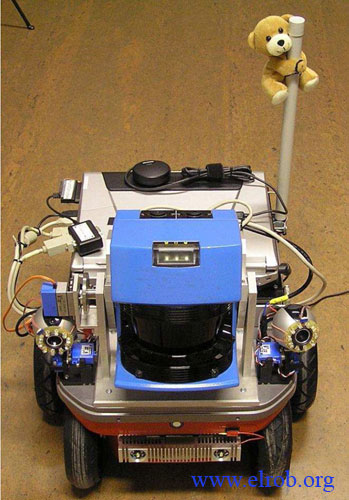
Данный робот участвовал в состязаниях в рамках городской местности. На самом деле полигон на ELROB 2006 представлял из себя муляж, на котором тренируются обычные военные, но в момент проведения соревнований «мертвый город» был населен роботами. Kurt3D достаточно миниатюрен и имеет размеры 55 см (высота с антенной) х 42 см (ширина) х 47 см (длина). Вес со всей «амуницией» составляет 25 кг, возможная дополнительная нагрузка — 5 кг.

С точки зрения электроники на борту робота имеется один компьютер (судя по всему ноутбук) с частотой процессора 1,4 ГГц, и установленной ОС Linux (SuSE 9.3). В нем также имеется встроенный Wi-Fi-интерфейс для связи со станцией управления. На крыше устройства установлен лазерный сканер и две видеокамеры, также есть гироскоп, одометр и система GPS. Оператор от ELROB дал задание для Kurt3D — составить трехмерную карту местности. И робот это сделал весьма успешно. Причем, как видите, он обходится только одним лазерным сканером для составления карты в объеме. Ну, а что мы получаем в итоге? В принципе, совокупность точек, соответствующих расположению определенных объектов с подробным указанием расстояний. Следовательно, чтобы сделать подробный план здания (вид сверху), роботу, вернее его алгоритмам, достаточно перевернуть картинку. То есть, получается, что робот въезжает в здание и составляет его подробный трехмерный план, который можно рассматривать с разных проекций.
Rheinmetall Defence Electronics and Roboterwerk Hubrich (Германия)
Наверное, многие не очень поверили, когда я говорил о том, что на полях сражений будущего (если таковые окажутся) будет присутствовать только роботизированная управляемая техника. Компания Rheinmetall Defence ведет свою историю с 1889 года, и ее основателем был инженер Генрих Ерхгардт (Heinrich Ehrhardt). Причем тогда эта компания называлась Rheinische Metallwaaren- und Maschinenfabrik Aktiengesellschaft, то есть в самом названии подчеркивалось производство металлических машин. А теперь, если посмотреть на современное название компании можно увидеть другие приоритеты — электронику и роботостроение. Rheinmetall Defence на данный момент занимается производством множества видов военной техники, как легкой, так и тяжелой. Объемы продаж в 2004 году составляли 1.384 миллионов евро, а в 2005 — 1.402 миллионов. То есть, как вы понимаете, счет идет на миллиарды.

На ELROB 2006 присутствовало множество команд, имеющих прямое или косвенное отношение к данной корпорации. Среди основных это: FoxBot (миниатюрные универсальные шестиколесные роботы), telebot (уникальные гусеничные механизмы для обнаружения взрывчатых веществ) и RLS. О последних мы и поговорим более подробно. RLS представляет, в основном, легкую бронетехнику. Например, на ELROB была продемонстрирована бронемашина с дистанционным управлением CARACAL. Она на колесном ходу.

Что касается непосредственно военных действий, то RLS роботизировала легкую гусеничную бронемашину Wiesel 2, теперь она также радиоуправляема. Отдельно стоит отметить восьмиколесную TROBOT (Tactical Robot), построенную на базе дизельного автомобиля Centaur. В данном случае «напичкиванием» электроникой занималась компания Robowatch Technologies. Причем тут мы говорим об очень навороченном варианте — Trimble AGPS 114 DGPS связанная с системой гироскоп/акселерометр, лазерный сканер LMS 200, радар EGAPULS 68 K-band, четыре отдельных лазерных сенсора IFM O1DLF2KG PMD, четыре ультразвуковых датчика дистанции PIL P43-O4V-2D-1C0-80E, видеокамера и система инфракрасного видения BFI LWIR. В принципе, это в стиле Robowatch. Сама разработка стартовала в августе 2005 года и продолжается до сих пор.

Что касается телероботов, предназначенных для обнаружения взрывчатых веществ, то со стороны команд от Rheinmetall Defence представлены две схожие модели — teleMAX (команда RLS) и telerob (команда telerob). Причем они схожи как конструктивно, так и по способу реализации передвижения — четыре трехколесных гусеничных привода.
В завершение
Что касается наземных машин, то основной спрос сейчас существует на роботов-обнаружителей взрывчатки, которые также можно использовать для спасательных операций. Достаточно быстрыми темпами развиваются технологии по составлению трехмерных карт местности, хотя по пустыне роботы уже могут самостоятельно передвигаться, остается только создать системы для самостоятельного передвижения в рамках города. Другой вопрос, а зачем? Конечно, с одной стороны мы можем прочитать множество материалов о прекрасном будущем с робо-такси, а с другой… разве остановишь военных? Как говорил Эйнштейн: «Я не знаю, каким оружием люди будут сражаться в третьей мировой войне, но в четвертой — палками и камнями». А я вам могу в свою очередь сказать — если вы на поле военных действий увидели невооруженным взглядом робота, то это значит, что он разведывательный или спасательный. Потому как если бы это был автономный робо-солдат, БМП или что-то подобное, то он заметил бы вас раньше.

Материал был впервые опубликован на
3DNews.ru