Студенческие соревнования
Intelligent Ground Vehicle Competition (IGVC) для многих из наших читателей в особом
представлении не нуждаются. Для тех, кто не в курсе, скажем, что это одни из самых крупных состязаний наземных роботов (на данный момент уже полностью автономно-управляемых), которые проводятся на территории США под руководством и спонсорской поддержкой крупнейших военных ведомств этой страны (в основном со стороны
TARDEC — Tank Automotive Research, Development and Engineering Center), а также ведущих объединений в области робототехники. Соревнования проводятся с 1993 года, и участвуют в них команды, представляющие крупнейшие вузы США, хотя в числе 56 команд этого года были отмечены представители Канады, Индии, Японии и ОАЭ. То есть, на сегодня — это уже интернациональное мероприятие.

Если говорить об уровне участников, то можно отметить, что некоторые команды помимо IGVC принимают участие во многих других крупных состязаниях, некоторых из «стариков» можно было заметить и на знаменитых DARPA Urban Challenge. А если сейчас зайти на сайты некоторых команд, то очевидно, что они живут от одних соревнований к другим, и занимаются только роботами.
5-10 лет назад с точки зрения призового фонда IGVC можно было считать скорее имиджевым мероприятием для участников, больше приносящим пользы в плане открытия карьерных перспектив. Но вместе с тем стоит отметить высокий уровень требований, который постепенно вывел IGVC в разряд одних из самых сложных ежегодных соревнований среди роботоделов, и в этом статусе мероприятие начало приобретать особую популярность. Сейчас денежные вознаграждения победителям значительно выросли, хотя, не смотря на спонсорскую поддержку со стороны крупных объединений, участникам 2011 года все-таки нужно было вносить предварительную оплату в размере $250.
Давайте рассмотрим, что было актуально для июньских состязаний, проходивших с 3-го по 6-е числа. Открытые данные о победителях появятся к концу июня, это так ожидается, а может и позже. Сайт IGVC обновляется неинтенсивно, причем не совсем понятно, делается ли это намеренно.
Общие требования к роботам. Квалификация
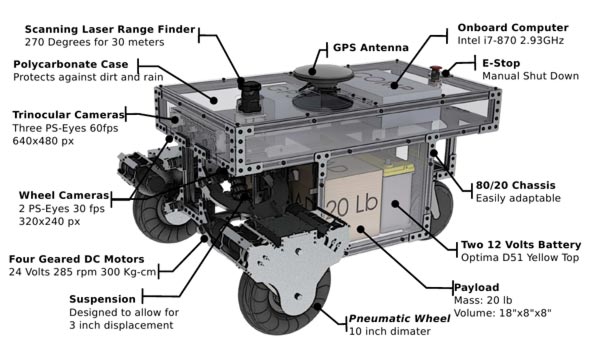
Исполнение: наземные машины с любыми способами передвижения.
Длина: минимум три фута, максимум — семь.
Ширина: минимум два фута, максимум — пять.
Высота: не больше 6 футов, исключая антенну.
Развиваемая скорость: минимум 1 миля в час, максимум — 10 миль в час. При этом в случае, когда машина не развивает скорость в 1 милю в час, проехав от старта 88 футов, она не допускается к соревнованиям, точнее, к его основным этапам.
Остановка устройства человеком (E-Stop) должна быть исполнена в двух видах — механическом (кнопка) и дистанционном (с расстояния минимум 100 футов). В рамках соревнований она производится командами либо судьями.
Должна быть предусмотрена световая индикация того, что устройство работает.
Каждый робот должен быть рассчитан на переноску груза — ящика с размерами 18х8х8 дюймов и весом в 20 фунтов.
Допуск машины к соревнованиям (его ключевым этапам) производится после специального квалификационного теста, в рамках которого проверяются соответствия вышеизложенным требованиям. Помимо этого производится проверка на ключевые способности, а именно, определение линии и следование по ней, обнаружение и объезд препятствий. После, по одобрению жюри, робот допускается к основным этапам. Если квалификация не пройдена, команда может принять участие только в двух этапах, где для них предусмотрены специальные призовые фонды, отдельные от остальных участников.
Об этапах и наградах
IGVC 2011 подразумевала четыре ключевые этапа, о которых мы подробнее расскажем ниже, а сейчас вкратце перечислим:
- Autonomous Challenge — перенос груза по трассе с препятствиями.
- Design Challenge — представление робота (документация, выступления).
- Navigation Challenge — задание на навигацию.
- JAUS Challenge — задание на взаимодействие с протоколом JAUS.
Каждый этап соревнований подразумевает собственный призовой фонд, то есть можно сказать, что это не совсем похоже на обычное спортивное многоборье, где все считается вкупе, хотя есть и общий приз по результатам всех вариантов состязаний. На каждом этапе наградными являются первые шесть мест. При этом есть интересное ограничение, а именно, если в призеры входит несколько команд из одного и того же учебного заведения, то деньги и само призовое место закрепляются за лучшей из них.
Поэтому помимо основного призового фонда в Autonomous Challenge предусмотрен дополнительный, где награждаются команды, не вошедшие в шестерку победителей. Дополнительные призовые фонды имеются и для всех остальных этапов: так в рамках Design Challenge и JAUS Challenge, за них сражаются команды, роботы которых не прошли квалификацию.
Этап Autonomous Challenge
На протяжении многих лет соревнований этот этап является ключевым, и, пожалуй, самым сложным. Основная задача — робот должен самостоятельно доставить груз от старта к финишу, не выезжая за границы трассы и объезжая препятствия.
Если вспомнить состязания 2004 года, начиная с которых мы стали отслеживать событие IGVC: тогда имелась очерченная линиями трасса с небольшим количеством препятствий (одинаковых, раскрашенных в оранжево-белую полоску бочек). Тогда это казалось на пике возможностей, и далеко не все команды успешно справились с заданием. Вместе с тем, уже в следующем году, организаторы пошли на усложнения, а именно сделали препятствия на трассе разноцветными. Потом были введены ограничения по минимальной скорости прохождения и так далее. Давайте же посмотрим, что предлагается уже в 2011-м…
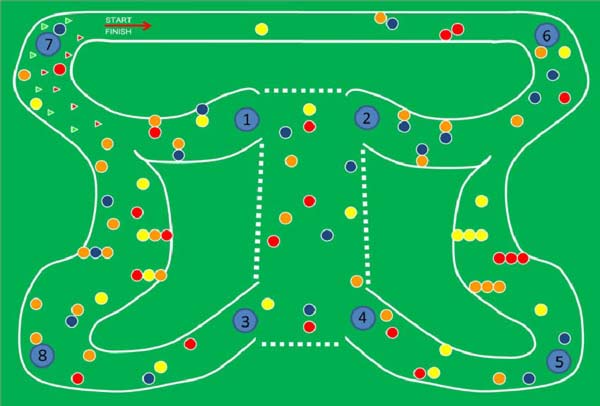
Соревнования этого года можно назвать очень сложными. Во-первых, на трассе появился участок, границы которого очерчиваются не сплошными, а пунктирными линиями. Помимо разноцветных препятствий, также в правилах было оговорено условие наличия естественных (деревья, кусты). Но и это не самый сложный момент. На трассе, в ее конце, появились флажки, которые также являются своего рода ограничителями, а именно, красные нужно объезжать слева, а зеленые справа. Причем флажки не расцениваются как препятствия, то есть их можно касаться, главное — это с какой стороны их объезжает робот.
Примерная схема трассы для этапа Autonomous Challenge
Трасса расположена на площади 330х240 футов и имеет общую длину 1330 футов.
Она является дифференцированной, что связано с внедрением в этап Autonomous Challenge GPS-навигации (см. примерную схему). Командам предлагается два варианта маршрутов следования с указанием контрольных точек. В рамках представленной схемы они описываются по ключевым точкам (waypoints) — 6-2-3-8-7 или же 6-5-4-1-7. По уровню сложности и расстоянию оба маршрута равноценны.
Любой из выбранных курсов нужно преодолеть за пять минут, по истечении этого времени, если финиш не достигнут, судьи нажимают E-Stop. При этом и система штрафов довольно жесткая.
- На старте робот должен за 88 футов разогнаться до скорости не менее 1 мили в час, иначе он снимается с трассы.
- Средняя скорость не должна быть меньше 1 мили в час, иначе робот снимается с трассы.
- Отклонение от курса — -10 футов.
- Столкновение с препятствием с его смещением — -10 футов.
- Небрежное вождение — -5 футов.
- Задевание препятствия — -5 футов.
- E-stop со стороны команды — -5 футов.
- Блокирование движения — -5 футов.
- Объезд флага не с той стороны — -5 футов.
Для того, чтобы не было непонятностей, скажем, что при судействе учитывается время, за которой робот достиг финиша. Снятие штрафных очков осуществляется просто — один штрафной фут приравнивается к одной штрафной секунде. Тот, у кого время прохождения будет наименьшим, становится победителем. Каждой команде дается право трех заездов (в каждом по три попытки).
В 2011 за первое место вручили $25 тыс. Чтобы упростить дальнейшее описание, здесь и дальше я не буду приводить суммы призов всех шести первых мест, а также дополнительных. Если вам это интересно, можете прочитать правила на сайте IGVC (http://igvc.org).
Этап Design Competition
Этот этап демонстрирует студенческую сущность мероприятия. Ведь помимо создания робота, его нужно грамотно и популярно представить публике, рассказать о реализованной модели и применяемых технологиях. Данный навык очень полезен для будущих инженеров, поскольку в технике очень много идей нужно уметь продвигать и продавать.
Причем данный этап делится на несколько промежуточных. Первый из них — письменный отчет (документация).
Требования: не более 15 стандартных страниц, включая текст и графические материалы. За превышение лимита снимается 5 очков. Все отчеты должны были быть высланы до 10 мая куратору соревнований, каждый день опоздания с отправкой — 10 очков штрафа.
Теперь о том, за что очки начисляются (указаны максимальные оценки по пунктам):
- Отображение процесса проектирования и организации команды (включая описание принятых решений и разработку программного обеспечения) — 50.
- Законченность документации — 50.
- Качество документации (английский язык, грамматика, и стиль) — 50.
- Эффективность инновации, представленной в дизайне (оценивается по тем же трем критериям, что описаны выше) — 150.
- Схематическое описание устройства — 100.
- Описание электронного наполнения — 100.
- Описание стратегии программного обеспечения — 150.
- Описание интеграции систем. Должно включать описания реализаций: отслеживания линий, обнаружения/объезда препятствий, навигации по ключевым точкам (GPS) — 150.
- Эффективное использование энергии и материалов — 50.
- Внимание, уделенное безопасности, надежности и долговечности — 50.
Второй промежуточный этап — выступление перед аудиторией. В данном случае очки начисляются за:
- Ясное и понятное изложение инноваций — 50.
- Логическую организацию выступления — 25.
- Эффективное использование графических материалов для помощи — 25.
- Артикуляцию — 20.
- Демонстрацию симуляции управления устройством — 10.
- Ответы на вопросы — 10.
- Способность это устройство продать — 10.
Итого, в максимальном случае за выступление перед аудиторией можно получить 150 очков.
Третий промежуточный этап — представление робота. В его рамках жюри оценивает машину по таким параметрам как:
- Емкость внешнего исполнения, эффективное использование пространства в рамках конструкции — 20.
- Удобство обслуживания — 20.
- Прочность — 20.
- Надежность — 20.
- Оценка оригинальности (уникальности) элементов — 50.
- Стильность дизайна, внешний вид — 20.
И если учитывать, что по максимуму на этом промежуточном этапе можно заработать опять же 150 очков, суммарно Design Competition может принести 1200.
И в данном случае мы говорим только об отборочном туре, после которого выбирается 6 команд финалистов, после чего они предстают перед жюри и представляют свою модель в режиме расширенного выступления. Приз за первое место в Design Competition составляет $3 тыс.
Этап Navigation Challenge
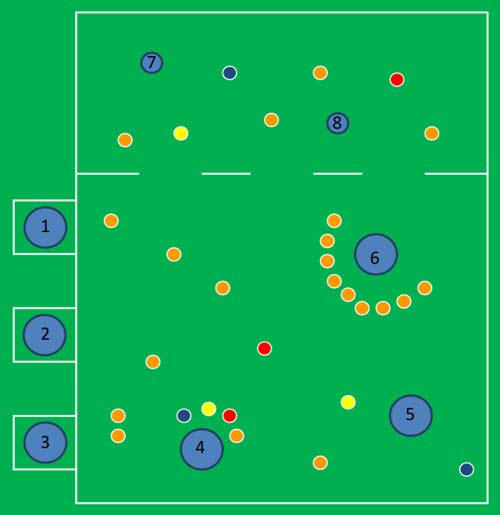
Этап Navigation Challenge довольно близок по идее к варианту Autonomous Challenge, только в его рамках робот, получая данные по GPS должен обойти все контрольные точки, координаты которых заранее даются в задании, и приехать к точке старта. На поле имеются различного рода препятствия (бочки, баррикады), которые нужно огибать, а также имеется область, отделенная стеновыми блоками. На соответствующем рисунке вы можете увидеть, что первые из трех точек являются стартовыми/финишными. Дело в том, что каждой из команд дается возможность одного заезда от каждой, а на каждый заезд выделяется две попытки.
В контрольные точки нужно въезжать с определенной точностью. Также даются ограничения по времени — все нужно обойти и приехать к финишу за пять минут. Точки и сама трасса построены по тому принципу, чтобы общее проходимое расстояние равнялось примерно 200 м, то есть средняя скорость передвижения робота в данном случае должна составлять 1,2 мили в час.
Многие участники делали основную ставку на Navigation Challenge, поскольку он проще Autonomous. И это так: не нужно отслеживать разметку, выполнять условия с флажками и т.п. То есть, достаточно иметь датчики определения препятствий, GPS и программу, которая преобразует данные с GPS в XY-представление, а также будет составлять оптимальный маршрут от одной точки к другой, руководствуясь координатами и данными о препятствиях. Кстати, это очень похоже на составление оптимального маршрута в компьютерных играх. И, наверняка многие использовали для этих целей тот же алгоритм А*-поиска, который мы когда-то описывали в серии материалов
«Популярно об ИИ».
Приз за первое место в данном состязании составлял $5000.
Этап JAUS Challenge
О том, что такое JAUS (Joint Architecture for Unmanned Systems) мы уже не раз
писали, напомним, что это проект, который используется в армии США, и подразумевает под собой общую архитектуру взаимодействия беспилотной техники. На самом деле, под JAUS сейчас принято подразумевать как семейство различных протоколов, так и вообще интерфейсов взаимодействия. То есть само понятие является общим, охватывающим различные области.
Для студентов в рамках соревнований IGVC, а также всех смежных состязаний (беспилотная авиация и т.п.) на базе JAUS было разработано программное обеспечение COP (Common Operating Picture), поддерживающее управление, описанное в JAUS Core Service Set (AS5710), а также коммуникацию через JAUS Transport Specification (AS5669A). И если говорить о последнем, то в рамках описываемых нами соревнований предусматривался протокол Ethernet-JUDP.
Хотя звучит все довольно сложно, на самом деле мы подразумеваем довольно простую и прозрачную схему взаимодействия интерфейсов, через которую производится управление роботами в рамках единой командной системы.
Также для указания ключевых точек и отслеживания текущего месторасположения используется стандарт JAUS Mobility Service Set (AS6009) или сокращенно JSS-Mobility.
Все эти документы, описания архитектур, протоколов и спецификаций, а также исходные коды можно найти в свободном доступе (если мы говорим о студенческом и пользовательском уровнях).
Сама программная оболочка COP является высокоуровневым решением, эмулирующим стандартный JAUS-протокол, а также выводящим все происходящее на клиентские приложения, например, в виде примитивной 2D-карты, на которой видны роботы, и ими можно управлять.
Помимо ряда простых заданий, командам нужно было и реализовать передвижение по ключевым точкам. Тут стоит несколько пояснить, что же оценивалось на самом деле. При взаимодействии интерфейсов вы просто общаетесь на уровне команд, но возможности и качество их исполнения зависят только от того, как это может произвести робот. Это зависит от двух составляющих: способностей самой машины и правильной интерпретации полученных команд. И в целом мы можем говорить о совместимости с JAUS.
Данный этап также являлся не самым трудным для студентов, причем в нем в рамках отдельного призового фонда могли участвовать машины, не прошедшие квалификацию. А главный приз этапа составлял $ 4 тыс.
Подытожим
В конце июня в Европе проводятся крупные состязания — Elrob, которые мы также опишем, причем они имеют другие правила, и, несомненно, представляют не меньший интерес. Что касается IGVC 2011, то, конечно, несколько удивил уровень требований Autonomous Challenge. Интересно, в какую сторону будут развиваться усложнения дальше. Учитывая, что в этот этап уже начали активно внедрять GPS-навигацию, вполне может статься, что вскоре откажутся от ограничительной разметки, указывая маршруты следования по GPS. Хотя, разметка может и остаться, и если она будет напоминать дорожную, то мы получим ничто иное, как аналог DARPA Urban Challenge (соревнования, в рамках которых беспилотные автономные машины ездили по городской местности). В принципе, любая из команд, участвовавшая в IGVC этого года смогла бы сделать такую машину.
Перепечатка материалов или их фрагментов возможна только с согласия автора.