Конечно, противники роботизации говорят о грядущей безработице в сферах, где роботы могут заменить людей. И это действительно в некоторых сегментах уже так и происходит. Например, в медицинском центре Сан-Франциско Университет Калифорнии полностью автоматизировал фармацевтическое подразделение. Теперь лекарства пациентам там выдают роботы. Но вместе с тем, многие последние события показывают, что есть необходимость в устройствах, которые смогут полноценно заменить человека в зонах повышенной опасности: радиационной, химической, термической. Думается, что теперь к теме роботов и исследованиям в данной области будет приковано более пристальное внимание. Не смотря на большие успехи в некоторых областях, большинство проектов подразумевает пока уровень концептов, представленных в научно-популярных новостях.
Улучшение интерактивности
Альберт Мерабиан (Albert Mehrabian) из Технологического Института Джорджии (Georgia Institute of Technology) занимается исследованиями в области вербальных и не-вербальных сообщений с 70-х годов прошлого века. Сейчас для своих опытов он создал робота по имени Simon. Задачей, которую решают в рамках проекта, является создание механического гуманоида с движениями, которые максимально схожи с человеческими. Дело в том, что роботы действительно по-другому двигаются (угловато, прерывисто), и люди уже привыкли делать на это скидку. Мерабиан видит в этом недостаток, поскольку интерактивное взаимодействие (есть такое распространенное понятие — Human-Robot interaction) не является полноценным. Simon спроектирован таким образом, чтобы полноценно повторять движение рук и головы, при этом на руках робота имеется пять пальцев, а не щупы-захваты. «Обучение» Саймона человеческим движением происходит по известной технологии mocap (motion-capture — захват движений), которая хорошо известна в областях 3D-моделирования/анимации (кино, компьютерные игры и т.п.).
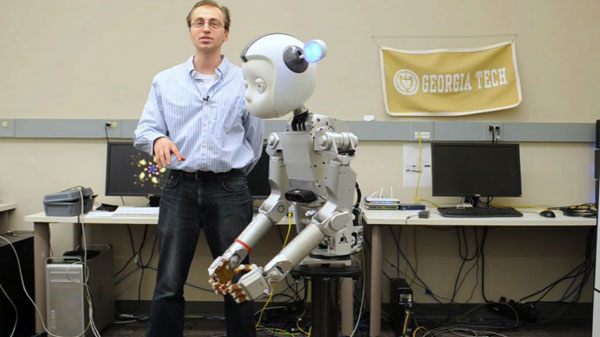
Вообще, разработчики делают большое дело, и результаты их исследований могут впоследствии пригодиться во многих сферах, в которых происходит или будет происходить непосредственно общение людей и роботов. Если последние будут двигаться естественно для человека, то контакты будут налаживаться эффективнее.
Состязания Perception Challenge
Мы уже писали о проекте от Willow Garage — открытой робо-платформе PR2 (Personal Robot 2). Напомним, что это андроид, передвигающийся на колесной платформе, в качестве кистей выступают специальные захваты с датчиками давления, акселерометром и светодиодными индикаторами (для того, чтобы можно быстро определить месторасположение каждой кисти). В голове расположены несколько вариантов видеокамер, текстурный проектор.
Платформа является открытой, в силу того, что техническое оснащение соответствует практически всем современным требованиям, а вот функциональность пока под вопросом — все зависит от заложенного программного обеспечения, коего на самом деле не много. Именно поэтому было решено сделать проект открытым. На сайте www.willowgarage.com вы можете найти множество документации, исходных кодов, а сейчас начали проводиться и конкурсы. До 15 апреля проводится набор команд на Perception Challengeб финал которого состоится до 1 мая, а церемония награждений пройдет во время конференции IEEE International Conference on Robotics and Automation (ICRA) 2011 в Шанхае (9-13 мая). Призовой фонд сравнительно небольшой, 1 место — $7000, 2 место — $2000, 3 место — $1000. При этом, эти суммы действительны для ситуаций с набором максимального количества очков, система начисления которых дифференцирована.
В целом, изначально дано 35 стандартных предметов (фотографии и описания), таких как пакет молока, банка кукурузы, бутыль с моющим средством и так далее, после добавляется еще 15. Нужно:
- Распознать один объект в различных положениях.
- Распознать много объектов в различных положениях.
- Распознать и идентифицировать (узнать) объект в различных положениях.
- Распознать и идентифицировать (узнать) множество объектов в различных положениях.
Зрение робота PR2
Стоит напомнить, что сам PR2 стоит $400 тыс. Количество проданных копий не озвучивается, хотя стоит отметить, что программировать можно и под конкретные комплектующие PR2, чем собственно open-source сообщество и занимается. К слову, скажем, что сами соревнования происходят интересным образом — участникам просто нужно выслать программный код.
Устройство базируется на специализированной операционной системе Robot Operating System (ROS, лицензия BSD), которая состоит из двух ключевых частей — основной, куда закладывается вся информация по возможностям устройства, то есть анализ, движения и так далее. Вторая часть — пользовательская, называется ROS-PKG. Туда загружаются способности и задачи.
Новости от Boston Dynamics
Напомним, что во второй половине прошлого года агентство DARPA выделило $32 млн компании Boston Dynamics для претворение в жизнь программы LS3 (сокращение от Legged Squad Support System — система поддержки шагающих подразделений). Речь идет о создании полноценных четырехногих роботов (квадрипедов), повторяющих биологические формы. Тогда Boston Dynamics продемонстрировала концепт робо-собаки Big Dog. В начале этого года компания представила два новых концепта, которые базируются на специальной разработке, некогда созданной для американской армии — антропоморфном роботе PETMAN. Все ПО, механические и электрические элементы будут взяты из него.
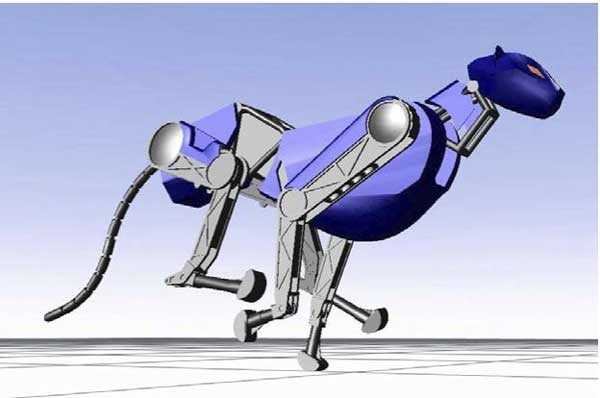
Первый концепт от Boston Dynamics, CHEETAH, повторяет движение гепарда. То есть, реализуется полноценная модель скелета, повторяющего зигзагообразный бег этого животного, причем учитывается и специфика: дело в том, что для поворота и торможения гепард использует в том числе и хвост.
Второй — ATLAS — является гуманоидом, использующим в качестве прототипа все тот же PETMAN.
Разработка для американской армии PETMAN стала
прототипом для концептов Boston Dynamics
Напомним, что по ожиданиям и предпосылкам DARPA, первые готовые к применению шагающие модели в рамках программы LS3 появятся в 2012 году, а Boston Dynamics на реализацию проекта «четвероногого собрата» был выделен 30-месячный период. Судя по всему речь шла о Big Dog. Новость о двух новых концептах интересна, прежде всего, с той стороны, что фирма нашла «технологического донора» для своих разработок — PETMAN.
Cougar20-Н
Американские военные на данный момент спонсируют довольно интересные разработки, созданием которых занимается компания TiaLinx. Последняя модель их робота Cougar20-H может не только видеть сквозь стены, но определить дыхание человека. Устройство оборудовано системой ультра-широкополосных (UWB), мульти-гигагерцовых радиочастотных сенсоров, камерами дневного и ночного видения, передвигается на гусеницах, управляется дистанционно в радиусе до 91 м.
Бывает…
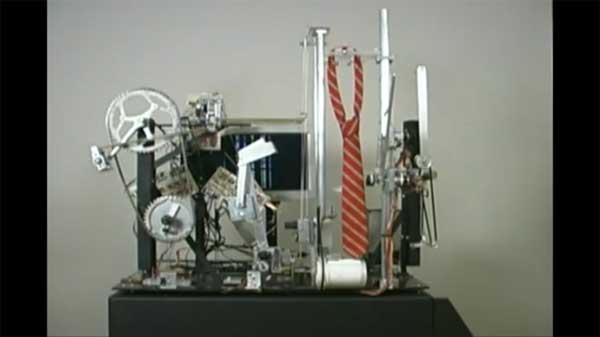
А вот это довольно веселая новость, только не совсем понятно, почему автор изобретения позиционировал его как робота, если бы представил как просто механизм, наверное, уже бы и спонсора нашел. В общем, в технике Seth Goldstein разбирается, и решил изобрести специального электромеханического робота, который бы завязывал галстуки.
Устройство называется 'Why Knot?'. Сделано из подручных средств, включая даже велосипедные детали. Видео с успехом обошло весь интернет.