Весна 2011 года — это, пожалуй, самый активный, после кризиса, период в области представления новинок робототехники. Идей много, при этом стоит сказать об их очень высоком уровне. Сейчас уже никого не удивишь кубиками, играющими в робо-футбол, или устройствами, отслеживающими очерченную линиями трассу. Довольно сильно вырос уровень интеллектуальности робо-систем как таковых, очень много экспериментируют с различными способами передвижения, в ряде сегментов можно наблюдать значительное удешевление технологий.
MAST-роботы
Идеи создания интеллектуальных систем, включающих множество мини-роботов или микро-роботов, ведущих себя как единый организм, используемый для разведки местности и создания карты помещений, появились довольно давно. Первые серьезные испытания начали проводиться в 2003 году в рамках проекта мини-ботов, а чуть погодя появилась полноценная программа развития этой темы от военных США, а именно, речь идет о U.S. Army's Micro Autonomous Systems and Technology (MAST), к которой были привлечены исследовательские лаборатории крупнейших университетов этой страны. В течение пяти лет эта программа управлялась со стороны BAE Systems. Причем в данном случае мы говорим, прежде всего, о миниатюрных решениях, оснащенных видеокамерами/специальными датчиками, предназначенных для исследования и составления карты местности. Изначально в состав разработчиков MAST входило пять основных участников, среди которых: Калифорнийский Университет в Беркли, Калифорнийский Технологический Институт с лабораторией Jet Propulsion, Технологический Институт Джорджии, Университет Нью-Мехико, Университет Сельского хозяйства и технологий Северной Каролины.
После состав проекта MAST претерпел некоторые изменения, расширившись за счет известных и значимых вузов, и на данный момент в него входят: Университет Сельского хозяйства и технологий Северной Каролины, Технологический Институт Джорджии, Калифорнийский Университет из Беркли, Университет Мэрилэнда, Университет Мичигана, Университет Нью-Мехико, Гарвард, MIT (Massachusetts Institute of Technology) и Daedalus Flight Systems.
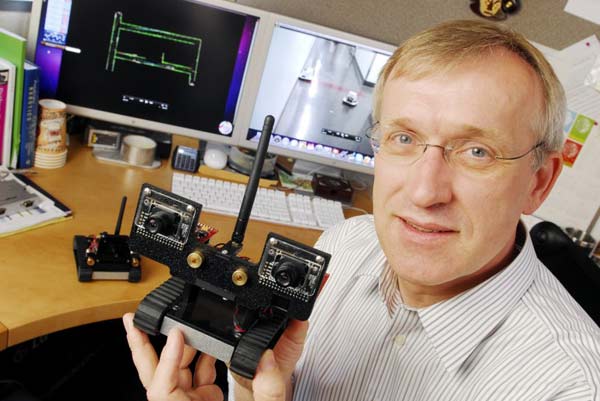
В конце весны-2011 были озвучены и продемонстрированы первые реальные результаты пятилетней деятельности программы, и среди первых их продемонстрировал Технологический Институт Джорджии. Они продемонстрировали миниатюрное полностью автономное устройство (т.е. не требующее отдельного управления человеком) на гусеничном приводе, оснащенное лазерными сканерами.
Принятая за основу графическая система SLAM (simultaneous localization and mapping) используется для сопоставления локальных данных с каждого отдельно взятого такого устройства, тем самым получается полноценная карта охватываемой местности либо отдельно взятого исследуемого помещения.
С точки зрения управления подразумеваются интеллектуальные системы, в рамках которых каждый из исследовательских роботов, его месторасположение и зона исследования корректируется отдельно, и, скорее всего, если анализировать ранее озвученные разработки в этой области, речь идет и об автоматическом перестраивании структуры в случае выхода одного или нескольких устройств из строя.
Помимо этого имеет смысл сказать, что программа MAST подразумевает не конкретно гусеничные механизмы, но также и летающие либо передвигающиеся другими способами. Другими словами мы говорим о создании некоей армии различных автономных и миниатюрных исследователей. Кстати, несколько лет назад в их качестве активно предполагали специальные вариации робо-насекомых. Проект MAST как таковой очень интересен с различных точек зрения, причем в первую очередь, он, скорее всего будет применяться на практике у военных и спасательных служб. В дальнейшем, как самый вероятный вариант — исследование космических тел.
Обучение движениям
В рамках института Фраунгофера технологии машиностроения и автоматизации IPA в Штутгарте сейчас проводятся довольно интересные опыты, позволяющие несколько по-другому взглянуть на концепцию создания современной робототехники. Применяемые в промышленности технологии, основанные на лазерном либо видео слежении (трекинге), сейчас являются фактически самым распространенным вариантом. Но при этом мы говорим о машинах, которые предназначены для выполнения конкретно заложенных операций. В последнее время эти концепции пересматриваются сразу несколькими исследовательскими лабораториями, которые предлагают сделать системы, способные переучиваться.
В рамках разработки института Фраунгофера предлагается использование системы инерционных датчиков для отслеживания движений в свободном пространстве, тем самым вы можете обучить робота новым «трюкам» просто показав ему те или иные новые движения. Это планируется применять не только в промышленности, но и, например, для создания робо-протезов.
Робо-рука, созданная лабораторией Бернхарда Клейнера из этого института будет продемонстрирована на Нюрнбергской выставке Sensor + Test (7-9 июня-2011), где будет показан пример, как ее можно научить, например, ловить мяч.
Новый рекорд от Cornell University
2 мая этого года четырехногий беспроводной радиоуправляемый робот Range разработки Cornell University поставил новый рекорд, а именно, прошел 40,5 миль (65,18 км) на одной зарядке без какой-либо сторонней помощи. Сделал он это за 30 часов 49 минут и две секунды. Свой путь он начал еще 1 мая, в общей сложности пройдя 307,75 овальных кругов по типу стадионных, средняя скорость передвижения составила 2,09 км/ч. Другие интересные данные: общая потребляемая мощность четырех моторов — 16 Ватт, в качестве источника питания использовалось 2,72-килограмм литий-ионных батарей питания.
Нужно отметить, что эта победа является продолжением июльских соревнований прошлого года, в рамках которых Range прошел 23,01 км, выиграв тем самым у BigDog разработки Boston Dynamics (тот преодолел на одной зарядке 20,6 км). Напомню, что о последнем мы уже писали, рассказывая об известной программе DARPA. Рекорд этого года был увеличен почти в три раза.
Персональный робот Luna от RoboDynamics
Мы уже не раз писали о роботах, предназначенных для персонального использования, но в се они большей частью являются не доступными по ценам обычным гражданам. Калифорнийская компания RoboDynamics решила исправить эту ситуацию и создала фактически первую бюджетную машину Luna, представив ее мировой общественности в середине мая. За дизайн модели отвечала компания SchultzeWORKS, а RoboDynamics предоставила техническую оснастку: процессор Dual Core Atom 2 GHz, Linux OS, физическая память на 32 Гб, 8-дюймовый сенсорный экран, три микрофона и динамики, реализация проводного и беспроводного подключений, 8-мегапиксельная камера, 3D-сенсор. Устройство запитывается от 12-вольтного аккумулятора, одной зарядки которого хватает на 4-8 часов работы.
При этом мы можем говорить фактически об открытой системе для программирования, то есть функциональность Luna может быть различной.
Предположительная цена на первый период составит $3000, в дальнейшем ее планируется снизить до $1000.
Уникальная разработка Технологического Института Джорджии
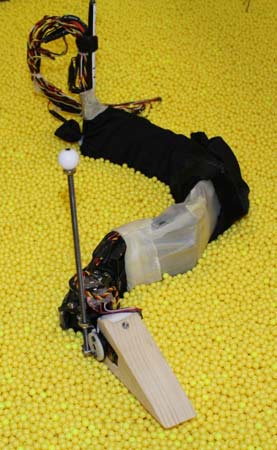
В принципе, эту разработку можно отнести не просто к новинкам в области роботостроения как таковым, но и рассматривать как определенные достижения в области модульных роботов (систем состоящих из идентичных блоков). Исследователи из Технологического Института Джорджии решили создать некий прототип, который позволяет передвигаться по гранулированным субстанциям наподобие ящерицы, хотя то, что у них получилось ближе к змее. Сам робот, его тело состоит из семи сегментов, каждый из которых оснащен сервомотором, при этом все помещено в оболочку из латекса.
А вот остроконечная голова сделана наподобие ящерицы, имеет до 7 степеней свободы, что, в принципе, и позволяет успешно перемещаться в «песке» из четвертьдюймовых гранул-шариков. Сама разработка интересна тем, что при последующей минимизации можно получить вполне нормального «робо-червя», хотя вариантов развития может быть несколько, например, разработчики видят ее будущее применение для спасательных операций.
На сим завершаю,